团队在分布式探测车辆定位领域取得了新的研究进展发表在Measurement
[2026-01-06]
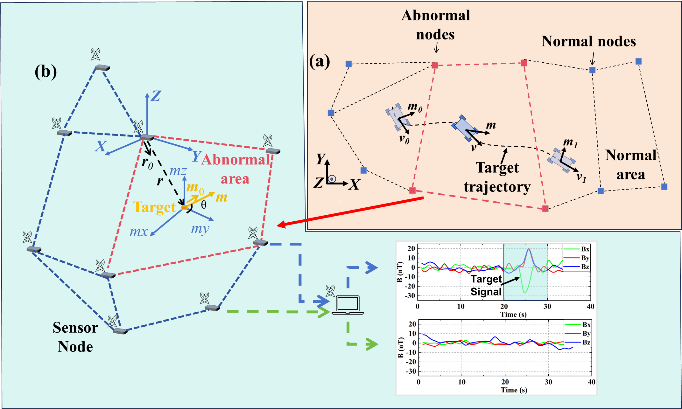
团队在非线性轨迹车辆跟踪领域取得重要研究进展,提出一种新型融合定位追踪算法,显著提升复杂运动目标跟踪精度与效率。该方法采用分布式磁传感器网络,结合网格搜索、粒子群优化与强跟踪多模型滤波技术,实现了对非线性运动车辆的实时高精度跟踪。相关研究成果以“Nonlinear trajectory vehicle tracking system based on distributed magnetic sensors network”为题,于2026年发表在测量领域国际期刊《Measurement》,第一作者为硕士研究生杨晨,第二作者为高俊奇教授,通讯作者为沈莹教授。
为了提高车辆在非线性运动下的定位与跟踪性能,本研究提出了一种新型GS-PSO-ST-IMM(网格搜索-粒子群优化-强跟踪交互多模型)算法框架。该算法首先利用地磁背景场先验信息,通过网格搜索与粒子群优化分层定位模型,实现车辆位置与磁矩的精确估计;其次,通过交互多模型滤波融合多种运动模型,并引入强跟踪机制动态调整滤波增益,以应对车辆突然转向、变速等非线性运动。仿真实验表明,与传统卡尔曼滤波相比,该算法速度误差降低38.7%,平均定位误差仅为0.99米。
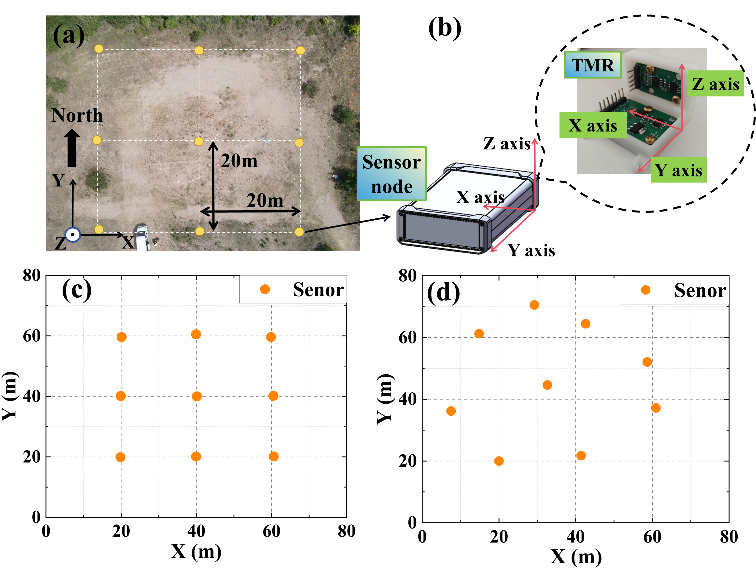
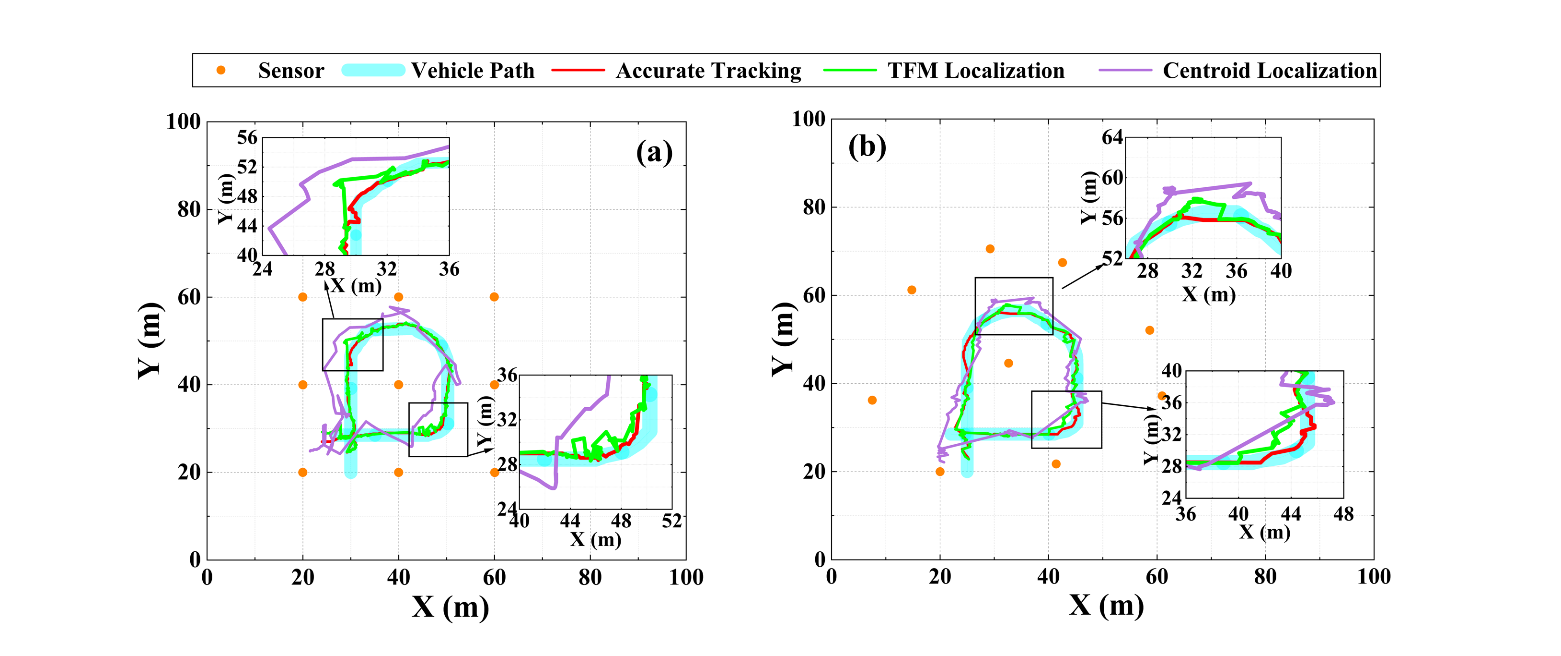
在实际外场实验中,该算法在规则与不规则传感器布局下分别实现了6.30%和8.43%的相对定位误差比,显著优于质心定位和总场匹配方法,同时保持了良好的实时性,平均处理延迟仅约2秒。这一方法通过有效融合多模型与动态跟踪机制,显著提升了车辆在复杂机动(如急转弯、变道等)下的跟踪稳定性与精度,为安防监控、交通管理等领域提供了有力的技术支撑。
本研究为基于分布式磁传感器网络的车辆跟踪提供了一种高效、鲁棒的解决方案,通过算法融合与模型优化,在保证实时性的同时大幅提升了复杂运动目标跟踪的准确性,具有重要的理论价值与工程应用前景。